|
Structural deformable models
|
#include <iostream>#include <fstream>#include <typeinfo>#include "SensorSet.h"#include "SensorColl.h"#include "mathutil.h"#include "Fourier.h"#include "DMatrixUtil.h"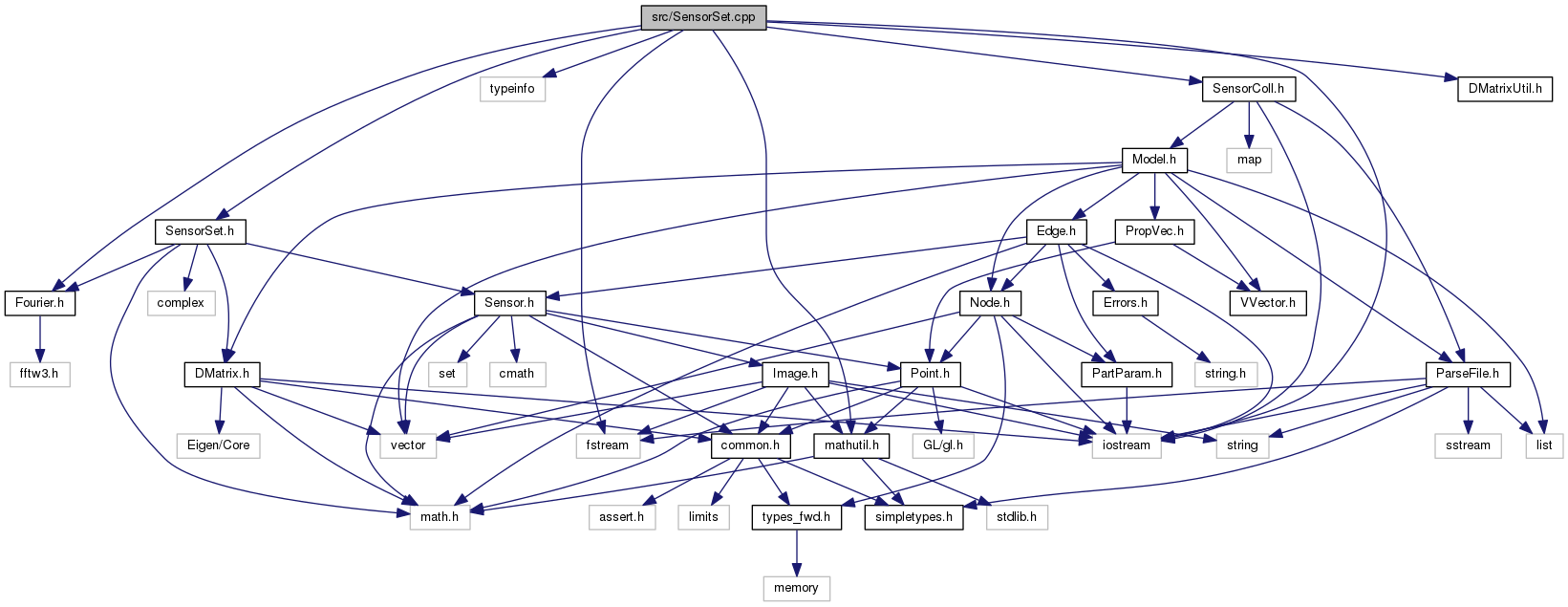
Go to the source code of this file.
Functions | |
| static Image< double > & | create2DGaussian (Image< double > &flt, double stdev, float clampd, float cx, float cy) |
|
static |
Definition at line 418 of file SensorSet.cpp.
References gaussd2(), Image< T >::getData(), Image< T >::getSizeX(), Image< T >::getSizeY(), dmutil::sum(), and TRACE.
Referenced by SmoothIntensitySensor::updateScale().
 1.8.11
1.8.11

