|
Structural deformable models
|
#include <SensorSet.h>
Public Member Functions | |
| CornerSensor () | |
| bool | performUpdate () |
| std::ostream & | print (std::ostream &os) const |
 Public Member Functions inherited from PPSensor Public Member Functions inherited from PPSensor | |
| PPSensor () | |
| virtual float | getValue (int x, int y) const |
| virtual Point | getGradient (int x, int y) const |
| Sensor & | assign (const Sensor &rhs) |
| void | togglePP (enum PPState state=PP_DO) |
| dword | getPPState () const |
| Public Member Functions inherited from Sensor | |
| virtual | ~Sensor () |
| sensor_cptr | getSource () |
| virtual void | changeSource (sensor_cptr _source) |
| void | replaceBy (sensor_ptr target) |
| bool | assignRef (sensor_cptr rhs) |
| float | getValue (const Point &p) const |
| get value at position p using nearest neighbour interpolation More... | |
| virtual std::vector< float > | getMValue (int x, int y) const |
| get multi-channel value More... | |
| Point2D | getGradient (const Point2D &p) const |
| get gradient at position p using nearest neighbor interpolation More... | |
| float | getMax () const |
| float | getMin () const |
| float | getMinMaxRange () const |
| float | getWeightedValue (int x, int y) const |
| get max normalized value at discrete position range [0,1] More... | |
| Point2D | getWeightedGradient (int x, int y) const |
| get range weighted gradient at discrete position More... | |
| void | setCWeights (const std::vector< float > &weights) |
| const std::vector< float > & | getCWeights () const |
| void | setDirection (const Point &dir) |
| const Point & | getDirection () const |
| void | setScale (float _scale) |
| float | getScale () const |
| bool | isModified (dword mask=UPD_ALL) const |
| void | setModified (dword mask=UPD_ALL) |
| void | unsetModified (dword mask=UPD_ALL) |
| bool | isUpdate (dword udMask) const |
| void | enableUpdate (dword udMask) |
| void | disableUpdate (dword udMask) |
| virtual int | getDim1Size () const |
| virtual int | getDim2Size () const |
| virtual int | getDim3Size () const |
| virtual int | getNChannels () const |
| virtual int | getSkip () const |
| bool | isValid (int x, int y) const |
| virtual Image< float > | createSensorImage () const |
| const std::string & | getID () const |
| void | setID (const std::string &id) |
| virtual std::ostream & | hprint (std::ostream &os, SensorCollection *sc) const |
| void | refSuperSensor (sensor_ptr super) |
| void | unrefSuperSensor (sensor_ptr super) |
| void | invalidateSource () |
| template<typename Derived > | |
| std::shared_ptr< Derived > | shared_from_base () |
Protected Member Functions | |
| float | calcValue (int x, int y) const |
| Protected Member Functions inherited from PPSensor | |
| void | fitSheets () |
| virtual void | calcAllValues () |
| virtual void | calcAllGradients () |
| Protected Member Functions inherited from Sensor | |
| Sensor (dword updateMask) | |
| Sensor () | |
| virtual std::vector< float > | calcMValue (int x, int y) const |
| virtual Point | calcGradient (int x, int y) const |
| virtual void | calcMinMax () |
Additional Inherited Members | |
| Public Types inherited from PPSensor | |
| enum | PPState { PP_DONT =0, PP_DO, PP_FORCE } |
| Public Types inherited from Sensor | |
| enum | UpdateParam { UPD_NOTHING =0, UPD_DATA =1, UPD_SCALE =2, UPD_CWEIGHTS =4, UPD_DIR =8, UPD_MINMAX =16, UPD_LAST =32, UPD_ALL =0xffffffff } |
| Static Public Member Functions inherited from Sensor | |
| static dword | getStringNumber (const char *sid) |
| static void | getNumberString (char sid[5], dword id) |
| Protected Attributes inherited from PPSensor | |
| Image< float > | values |
| caching sheet for sensed values More... | |
| Image< Point > | gradients |
| caching sheet for gradients More... | |
| dword | doPP |
| do preprocessing? More... | |
| Protected Attributes inherited from Sensor | |
| sensor_cptr | source |
| float | scale |
| std::vector< float > | cweights |
| multi-channel weights ('color') More... | |
| Point | dir |
| direction parameter More... | |
| float | maxval |
| float | minval |
| overall minimum and maximum More... | |
| float | mean |
| float | stdev |
| overall mean and stdev More... | |
| dword | toupdate |
| bitflag for updates More... | |
| dword | updateMask |
| bitflag to mask unimportant updates More... | |
| std::string | m_ID |
| int | m_Skip |
| int | m_AddSkip |
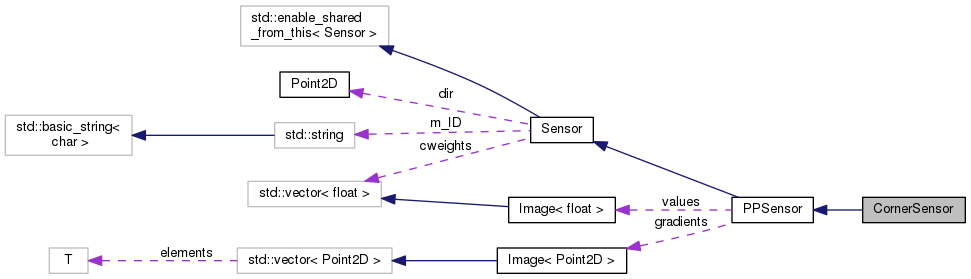
curvature Sensor
Definition at line 202 of file SensorSet.h.
|
inline |
Definition at line 204 of file SensorSet.h.
References Sensor::enableUpdate(), Sensor::m_AddSkip, PPSensor::PP_FORCE, and Sensor::UPD_DATA.
|
inlineprotectedvirtual |
Compute cornerness
Implements Sensor.
Definition at line 224 of file SensorSet.h.
References Sensor::isValid(), Point2D::normalize(), Sensor::source, Point2D::x, and Point2D::y.
|
inlinevirtual |
clear all data sheets
Reimplemented from PPSensor.
Definition at line 211 of file SensorSet.h.
References Sensor::isModified(), Sensor::m_AddSkip, Sensor::m_Skip, PPSensor::performUpdate(), Sensor::source, and Sensor::UPD_DATA.
|
inlinevirtual |
 1.8.11
1.8.11

