|
Structural deformable models
|
#include <SensorColl.h>
Public Member Functions | |
| SensorCollection () | |
| ~SensorCollection () | |
| sensor_ptr | addSensor (const std::string &key, sensor_ptr s) |
| sensor_ptr | addSensor (sensor_ptr s) |
| sensor_ptr | readSensor (ParseFile &is) |
| sensor_ptr | getSensor (const std::string &id) |
| SensorCollection & | merge (SensorCollection &rhs) |
| bool | isPrinted (const std::string &id) const |
| void | setPrinted (const std::string &id) |
| void | clearPrintList (bool skipdefaults=true) |
| void | refModel (Model *model) const |
| void | unrefModel (Model *model) const |
| void | updateModels () const |
| void | selectSensor (const std::string &name) |
| const std::string & | getSelectedSensor () const |
Protected Attributes | |
| std::set< std::string > | m_Printlist |
| std::set< Model * > | m_Models |
| references to attached geometry More... | |
| std::string | m_SelSensor |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const SensorCollection &sc) |
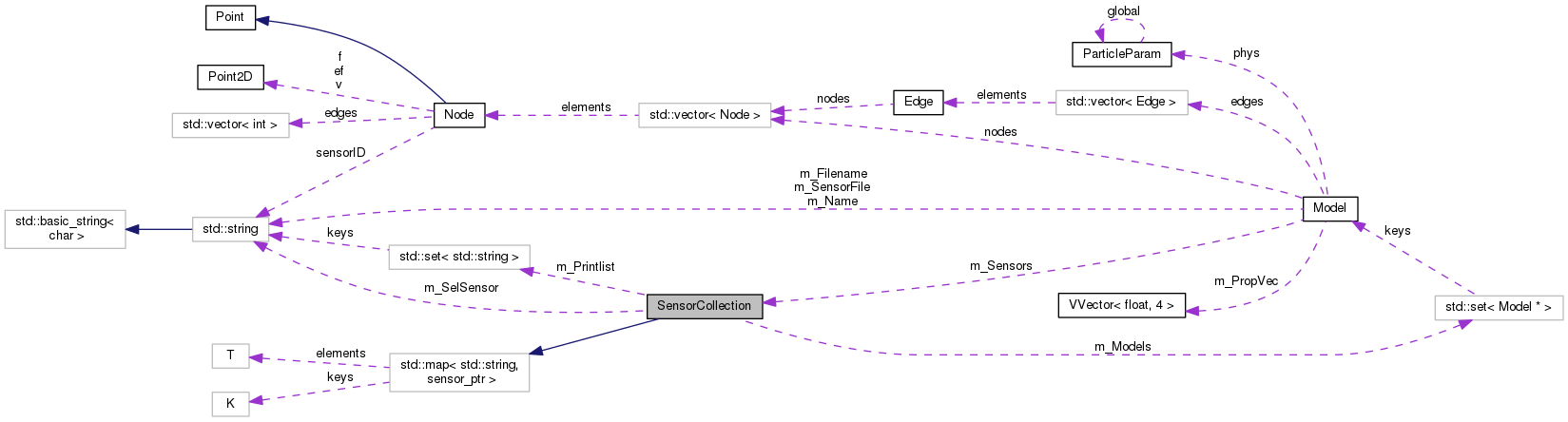
Definition at line 11 of file SensorColl.h.
| SensorCollection::SensorCollection | ( | ) |
Definition at line 16 of file SensorColl.cpp.
References getZeroSensor().
| SensorCollection::~SensorCollection | ( | ) |
Definition at line 21 of file SensorColl.cpp.
| sensor_ptr SensorCollection::addSensor | ( | const std::string & | key, |
| sensor_ptr | s | ||
| ) |
Definition at line 24 of file SensorColl.cpp.
Referenced by Model::attachDataset(), Brain::Brain(), Model::readSensor(), and Brain::triggerTest().
| sensor_ptr SensorCollection::addSensor | ( | sensor_ptr | s | ) |
Definition at line 30 of file SensorColl.cpp.
| void SensorCollection::clearPrintList | ( | bool | skipdefaults = true | ) |
|
inline |
Definition at line 32 of file SensorColl.h.
References m_SelSensor.
Referenced by Brain::triggerTest().
| sensor_ptr SensorCollection::getSensor | ( | const std::string & | id | ) |
Definition at line 52 of file SensorColl.cpp.
Referenced by Model::attachDataset(), Model::readNode(), Model::reattachSensors(), and Brain::triggerTest().
| bool SensorCollection::isPrinted | ( | const std::string & | id | ) | const |
Definition at line 75 of file SensorColl.cpp.
Referenced by Sensor::hprint(), CombiSensor::hprint(), and operator<<().
| SensorCollection & SensorCollection::merge | ( | SensorCollection & | rhs | ) |
Definition at line 256 of file SensorColl.cpp.
References Sensor::replaceBy().
Referenced by Model::mergeSensorCollection().
| sensor_ptr SensorCollection::readSensor | ( | ParseFile & | is | ) |
Definition at line 101 of file SensorColl.cpp.
References ParseFile::getKey(), ParseFile::getNextLine(), ParseFile::getValue(), getZeroSensor(), NULL, ParseFile::pushLine(), ParseFile::setParseError(), and SHOW.
Referenced by Model::readSensor().
| void SensorCollection::refModel | ( | Model * | model | ) | const |
Definition at line 282 of file SensorColl.cpp.
Referenced by Model::attachSensorColl(), and Model::Model().
|
inline |
| void SensorCollection::setPrinted | ( | const std::string & | id | ) |
Definition at line 80 of file SensorColl.cpp.
Referenced by Sensor::hprint(), and CombiSensor::hprint().
| void SensorCollection::unrefModel | ( | Model * | model | ) | const |
Definition at line 287 of file SensorColl.cpp.
Referenced by Model::attachSensorColl().
| void SensorCollection::updateModels | ( | ) | const |
Definition at line 292 of file SensorColl.cpp.
Referenced by Brain::load(), Brain::loadModel(), and Brain::triggerTest().
|
friend |
Definition at line 85 of file SensorColl.cpp.
|
mutableprotected |
references to attached geometry
Definition at line 36 of file SensorColl.h.
|
protected |
Definition at line 35 of file SensorColl.h.
|
protected |
Definition at line 37 of file SensorColl.h.
Referenced by getSelectedSensor(), and selectSensor().
 1.8.11
1.8.11

