|
| | ZeroSensor () |
| |
| void | changeSource (sensor_cptr source) |
| |
| int | getDim1Size () const |
| |
| int | getDim2Size () const |
| |
| int | getDim3Size () const |
| |
| int | getNChannels () const |
| |
| float | getWeightedValue (int x, int y) const |
| |
| Point2D | getWeightedGradient (int x, int y) const |
| |
| std::ostream & | print (std::ostream &os) const |
| |
| virtual | ~Sensor () |
| |
| sensor_cptr | getSource () |
| |
| void | replaceBy (sensor_ptr target) |
| |
| bool | assignRef (sensor_cptr rhs) |
| |
| virtual Sensor & | assign (const Sensor &rhs) |
| |
| virtual float | getValue (int x, int y) const |
| | get value at discrete position More...
|
| |
| float | getValue (const Point &p) const |
| | get value at position p using nearest neighbour interpolation More...
|
| |
| virtual std::vector< float > | getMValue (int x, int y) const |
| | get multi-channel value More...
|
| |
| virtual Point2D | getGradient (int x, int y) const |
| | get gradient at discrete position More...
|
| |
| Point2D | getGradient (const Point2D &p) const |
| | get gradient at position p using nearest neighbor interpolation More...
|
| |
| float | getMax () const |
| |
| float | getMin () const |
| |
| float | getMinMaxRange () const |
| |
| float | getWeightedValue (int x, int y) const |
| | get max normalized value at discrete position range [0,1] More...
|
| |
| Point2D | getWeightedGradient (int x, int y) const |
| | get range weighted gradient at discrete position More...
|
| |
| void | setCWeights (const std::vector< float > &weights) |
| |
| const std::vector< float > & | getCWeights () const |
| |
| void | setDirection (const Point &dir) |
| |
| const Point & | getDirection () const |
| |
| void | setScale (float _scale) |
| |
| float | getScale () const |
| |
| bool | isModified (dword mask=UPD_ALL) const |
| |
| void | setModified (dword mask=UPD_ALL) |
| |
| void | unsetModified (dword mask=UPD_ALL) |
| |
| bool | isUpdate (dword udMask) const |
| |
| void | enableUpdate (dword udMask) |
| |
| void | disableUpdate (dword udMask) |
| |
| virtual bool | performUpdate () |
| |
| virtual int | getSkip () const |
| |
| bool | isValid (int x, int y) const |
| |
| virtual Image< float > | createSensorImage () const |
| |
| const std::string & | getID () const |
| |
| void | setID (const std::string &id) |
| |
| virtual std::ostream & | hprint (std::ostream &os, SensorCollection *sc) const |
| |
| void | refSuperSensor (sensor_ptr super) |
| |
| void | unrefSuperSensor (sensor_ptr super) |
| |
| void | invalidateSource () |
| |
| template<typename Derived > |
| std::shared_ptr< Derived > | shared_from_base () |
| |
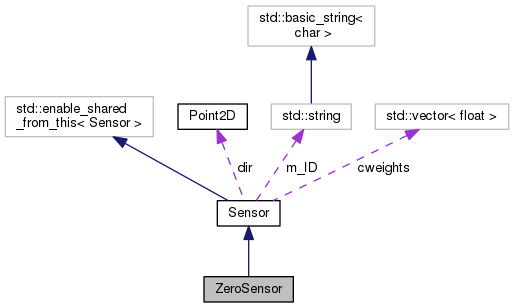
a sensor that does nothing except returning zeros
Definition at line 203 of file Sensor.h.
 Public Member Functions inherited from Sensor
Public Member Functions inherited from Sensor 1.8.11
1.8.11

