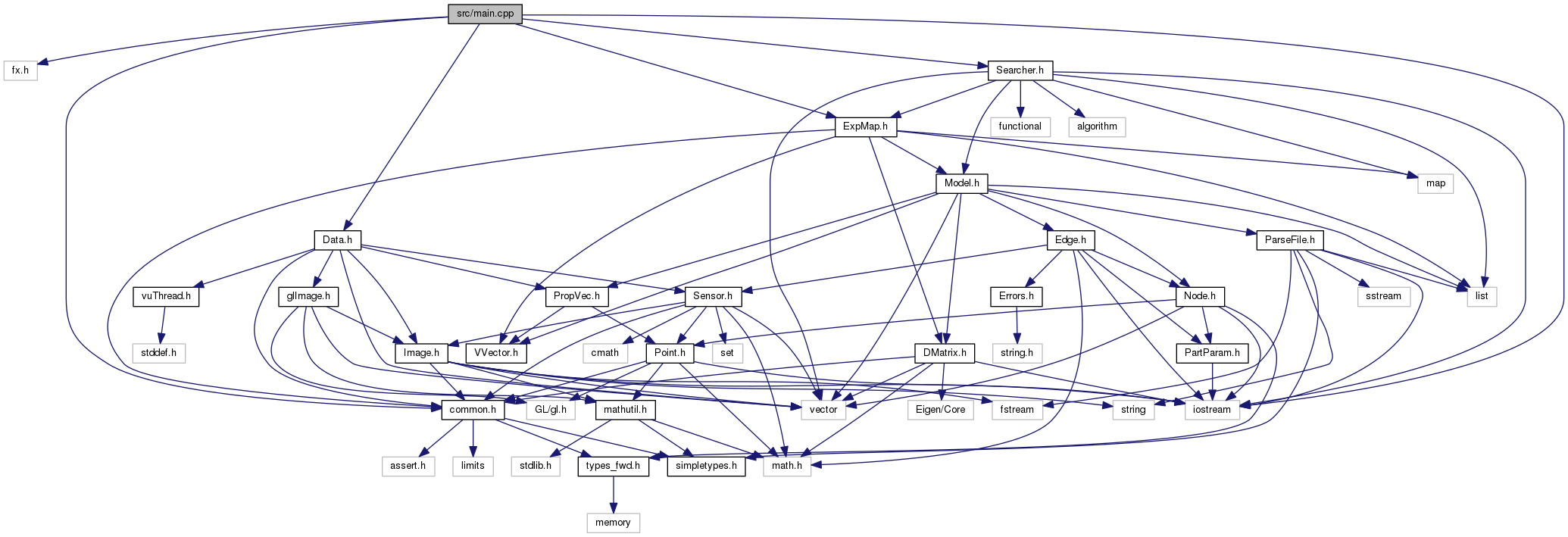
#include <fx.h>
#include <iostream>
#include "common.h"
#include "Data.h"
#include "ExpMap.h"
#include "Searcher.h"
Go to the source code of this file.
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
Definition at line 19 of file main.cpp.
References ExpectationMap::add(), DUMP, ExpectationMap::generateInstance(), Dataset::getDim1Size(), Dataset::getDim2Size(), Model::getProperties(), ExpectationMap::getPropVec(), M_PI, EMDRect::ratePropVec(), EMDGauss::ratePropVec(), Model::readFile(), Searcher::setExpectationMap(), EMDRect::setLB(), setPropDir(), setPropPos(), setPropScale(), EMDRect::setUB(), and ExpectationMap::updateIntegral().
22 FXApp application(
"Deformable Model Segmentation",
"FoxText");
24 application.init(argc,argv);
28 model.readFile(
"quadc.dm");
34 Point2D dims((
float)data.getDim1Size(),
35 (float)data.getDim2Size());
42 cout <<
"propl="<<propl<<endl;
43 cout <<
"propu="<<propu<<endl;
44 cout << em.updateIntegral() << endl;
46 PropVec propc((propl+propu)*0.5);
50 cout << em.updateIntegral() << endl;
51 cout <<
"rdv=" << em.getPropVec() << endl;
54 DUMP(gd.ratePropVec(propc));
55 DUMP(gd.ratePropVec(propc+propd));
56 DUMP(gd.ratePropVec(propc+(propd*3)));
58 cout <<
"------------" << endl;
59 DUMP(model.getProperties());
60 Model *gm = em.generateInstance();
61 DUMP(gm->getStdRadius());
62 DUMP(gm->getProperties());
void setExpectationMap(const ExpectationMap &em)
PropVec & setPropDir(PropVec &prop, float dir)
PropVec & setPropPos(PropVec &prop, const Point2D &p)
PropVec & setPropScale(PropVec &prop, float pscale)
float ratePropVec(const PropVec &prop, Winner *winner=NULL) const
| bool setStatusText |
( |
const char * |
stext | ) |
|
Definition at line 14 of file main.cpp.
15 cout <<
"Status: " << stext << endl;
| bool setTitle |
( |
const char * |
title | ) |
|
Definition at line 9 of file main.cpp.
10 cout <<
"Title: " << title << endl;
 1.8.11
1.8.11

